
Pixhawk

現在、使用されているドローンに搭載してあるフライトコントローラーはDji製の物が多いかと思います。ファントムといったDjiが販売している物もあれば、外装はオリジナル製品を使い、ドローンの頭脳であるフライトコントローラーはDji製を使用している機体もあります。Dji製のフライトコントローラーはマルチコプター専用で作られており、取付けから設定まで簡単に出来るようになっています。通常のフライトから撮影、農薬散布用等のフライトコントローラーがDjiより販売されています。通常のフライトであれば安全性の高いDji製のフライトコントローラーを使用して頂いて問題ないかと思います。
ただ、ドローンに特殊なセンサーや機械を取り付け、そのセンサーからの情報をもとに飛行させるなどの拡張性はありません。基本的にはDji製のフライトコントローラーはDji製のセンサー等を使用する事が前提で作られているためです。新しい機能を持ったドローンの開発などには向いていません。そのような場合はオープンソース系のフライトコントローラー・オートパイロット・ロボットコントローラーを使用する事をお勧めします。オープンソース系のフライトコントローラーは非常に多くの製品があります。
主要コンポーネント
ドローンの制御系は、センサー、駆動系、通信系を除く以下の3つの基本コンポーネントが必要であり、お互いが密に連携しているため組み合わせが重要になります。

1.フライトコントローラーハードウェア
機体側のコンピューター。センサー、通信モジュールからの入力を受け、目標とする姿勢や振る舞いと、現在の差異を計算し、目標値により近づくよう駆動装置へ信号を出力します。大きく分けて、マイクロコントローラー系とシングルボードコンピューター(SBC)系に別れます。マイクロコントローラーは最低限の機能を持ったライブラリかRealtime OSの上に、制御プログラムが走る形式。例としてはArduino等があげられます。シングルボードコンピューターは通常Linuxが動作するクレジットカードサイズ程度の小型所電力コンピューター。例としてはRaspberry Pi、BeagleBone等があります
2.フライトコントローラーソフトウェア
フライトコントローラー上で走る制御ソフトウェア。Pixhawk系のシステムでは、PX4 Native Stackか、ArduPilotかどちらかを選ぶことになります。
3.GCS (Ground Control Station|Software|System)
PCやタブレット上で動作し、機体にコマンドを送ったり、機体から送られてくるセンサーデータ等を表示する管制ソフトウェア。通常、機体側ソフトウェアの設定やアップグレード、ログ解析などもこのソフトで行います。Pixhawk系は、MAVLinkに対応しているので基本的な機能はどの組み合わせでも可能ですが、独自機能への対応状況はやはり純正の組み合わせ(PX4 Native Stack + QGroundControl、ArduPilot + MissionPlanner等)が良いです。MissionPlannerはWindows版のみ、TowerはAndroid版のみ等、プラットフォームの制約もあります。
汎用性・拡張性
オープンソース系のフライトコントローラーはマルチコプターだけでなく車・ボート・ヘリコプター・飛行機・VTOL(マルチコプターと飛行機の組み合わせ等)等、多種多様な形のものに搭載することが可能です。
- マルチコプター
- ROVER(車)
- VTOL機

マルチコプター(着水可能モデル)
着水できる機体にPixhawkを載せた機体です。
オートパイロット機能を使い完全自動飛行が可能。
着水可能なプラットフォームを使用しているので、湖面などに着水をし、再度浮上することが出来ます。
この機体は飛行→着陸(着水)→モーターの停止→モーター始動→再度浮上→飛行を繰り返すことが出来ます。
着陸(着水)した後に無駄な電力消費を抑えるためにモーターを止めることが出来ます。
1フライトで複数回の着陸(着水)、飛行が可能。
これが可能なのもオープンソース系フライトコントローラーの強みだと思います。
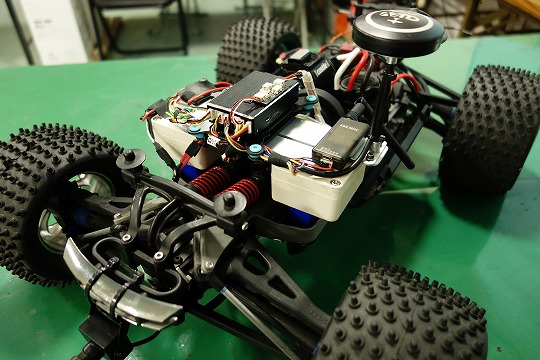
ROVER(車)
ラジコンカーにPixhawkを搭載したモデルです。



完全自動で走行することはもちろんですが、携帯電話のSIMを使うことにより遠隔操作が可能になります。
例えば機体は沖縄にあり、操縦者は北海道にいて機体に搭載しているカメラの映像を見ながら操縦することが出来ます。

VTOL機
VOTL機はマルチコプターと飛行機のハイブリットになります。
マルチコプターだと複数のモーターを動かし飛行するため電池をたくさん消費します。
飛行機はマルチコプターより少ないモーターで推進力を得て、飛行しています。
なのでマルチコプターより少ない電力で飛行する事が出来ます。
しかし飛行機の場合、離陸・着陸時に滑走路が必要になるという欠点があります。
そこでVTOL機の登場です。VTOL機は離陸・着陸時はマルチコプター、そして飛行が安定したらマルチコプターのモーターを停止し
推進力を得るためのモーターで飛行します。